Задча пробросить СОМ порт, на котором висит педаль (footswitch), на другую машину, на другой стороне океана 🙂 Или в локальной сети? Не принципиально. Если для локалки ничего делать не надо, то для связи с удаленной машине (И ВООБЩЕ ЛЮБЫХ коммуникаций через интернет с DXLOG) нужно поднимать VPN канал. Любой, начиная от «хамачи» и «radmin-vpn» и заканчивая Tailscale или OpenVpn. DXLOG требует UDP , который может работать только через VPN. Если вдруг вам нужно INTERLOCK заюзать, то без VPN никак…
Итак машина 1 «удаленный клиент передатчик».
Машина 2 «локальный клиент приемник» стоит по ту сторону VPN канала, туда надо передать статус педали (нажата да/нет?).
Вот так странно пришлось назвать машины, потому как ирония ситуации в том, что серверная часть ставится именно на «локальном приемнике», а клиентская часть на «передатчике». Хотя в обычной терминологии сервер всегда передатчик, а клиент принимает. (условно).
Порты на машине 1
Сразу оговорюсь, для нормальной работы «USB педаль» должна быть подключена напрямую в DXLOG, без посредников.
Для транспортировки будем использовать SDC (Software Defined Connectors) от уважаемого UT4LW
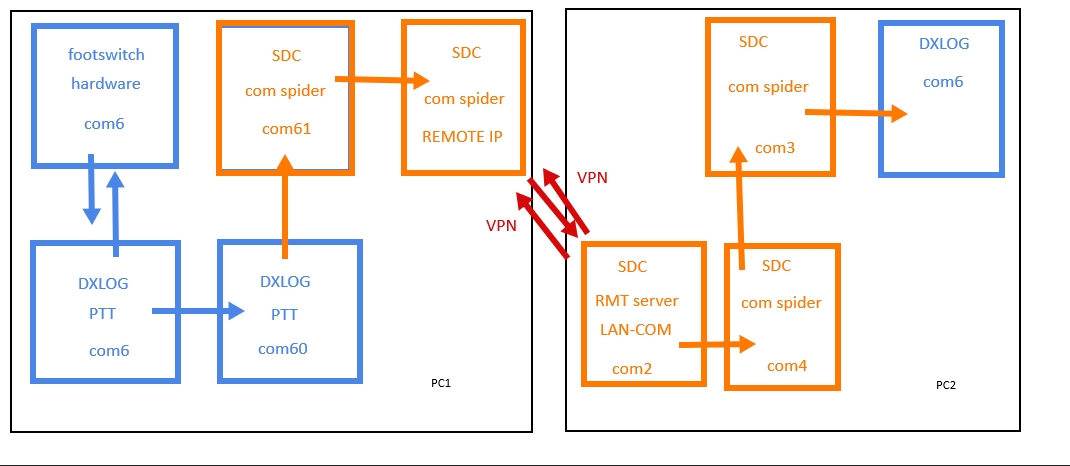
Схема подключения:
Настройки (связь) внутри DX LOG для машина 1 «удаленный клиент передатчик».
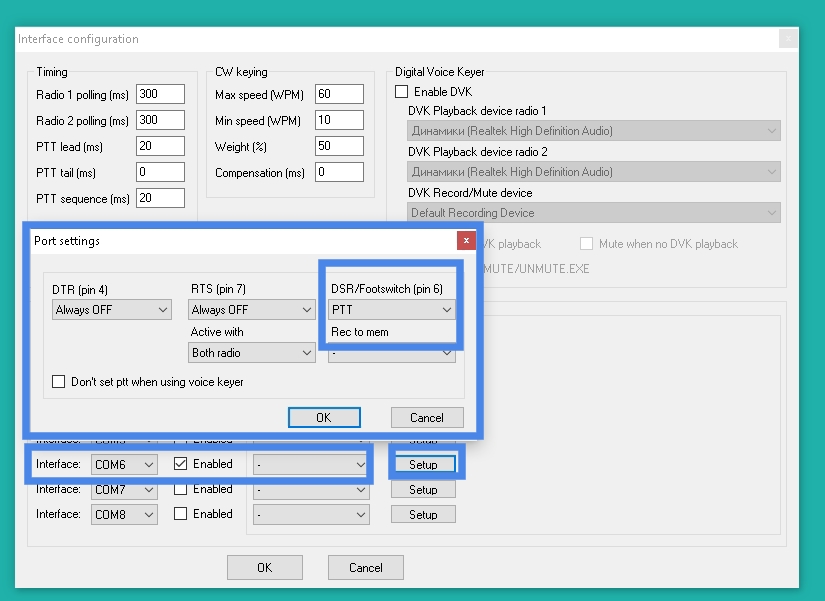
Настройки внутри DXLOG касательно передачи статуса педали для машина 1 «удаленный клиент передатчик».
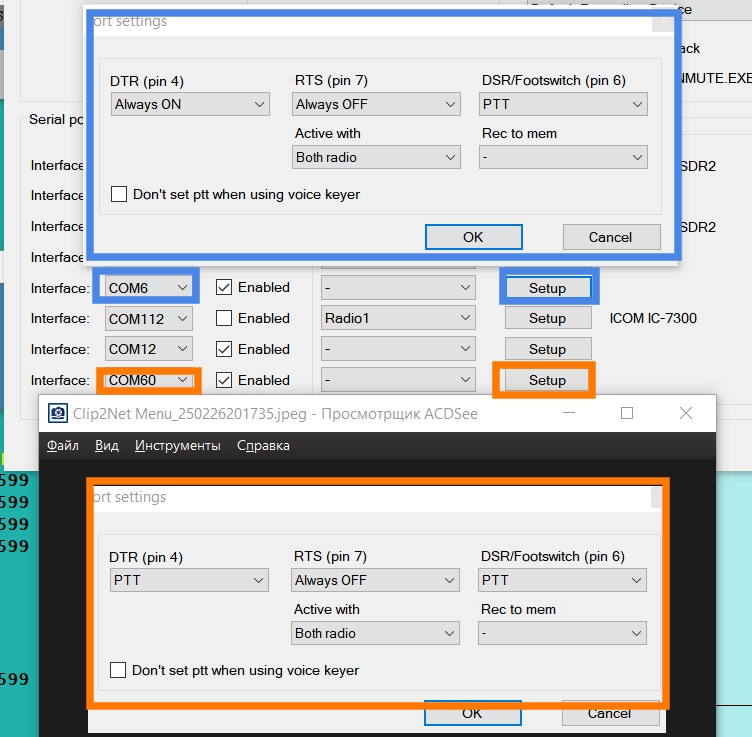
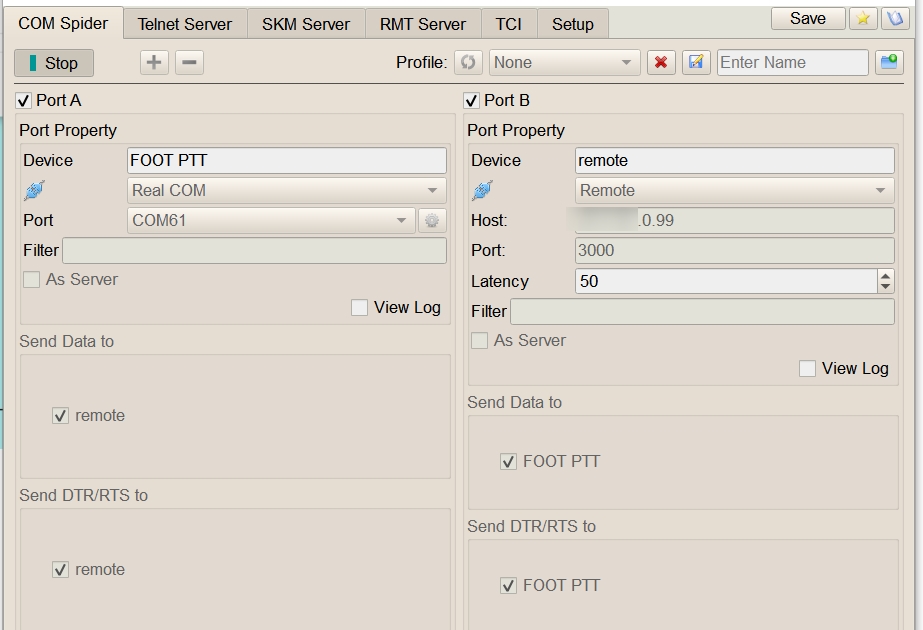
Настройки SDC для машина 1 «удаленный клиент передатчик».
Выглядит, скажем честно, громоздко. Однако схема рабочая.
Схематично, ВСЕ целиком выглядит вот так.
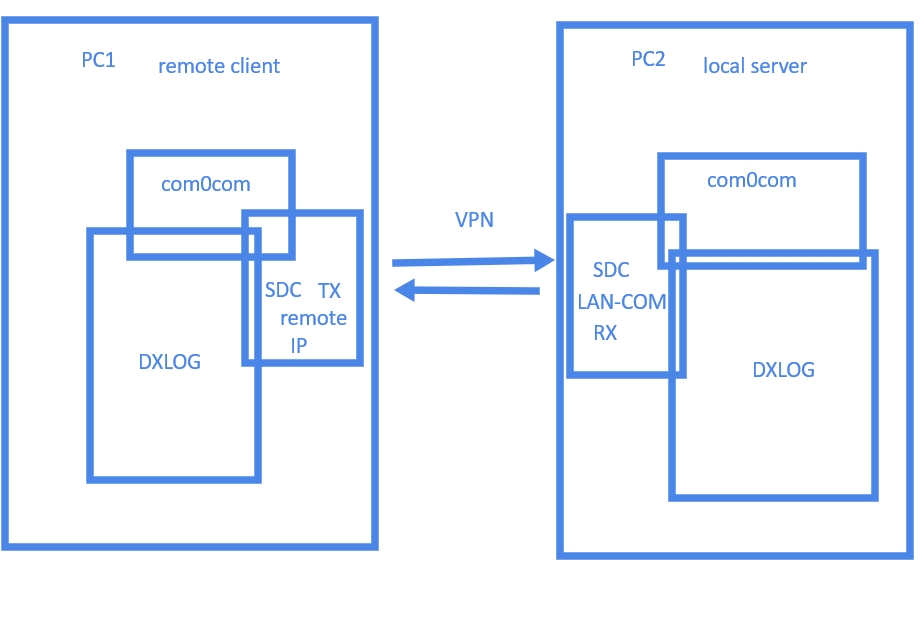
Т.е. для обмена данными между DXLOG , требуется привлекать/использовать COM-0-COM , а так же SDC
comOcom использована версия 2.2 , так что подписана и без проблемно ставится под WIN10, где все это пробрасывалось.
Теперь машина 2 «локальный клиент приемник»:
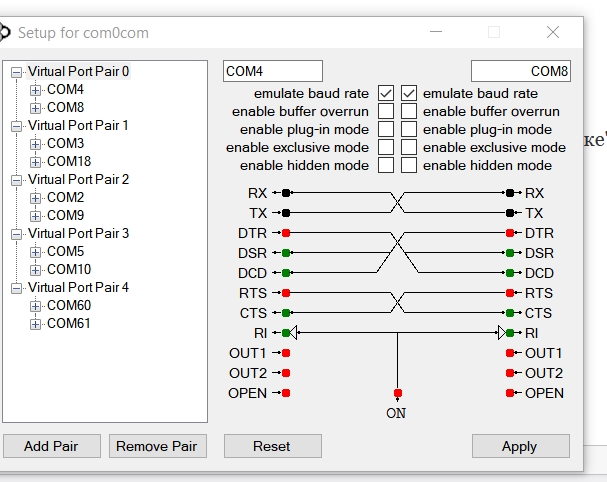
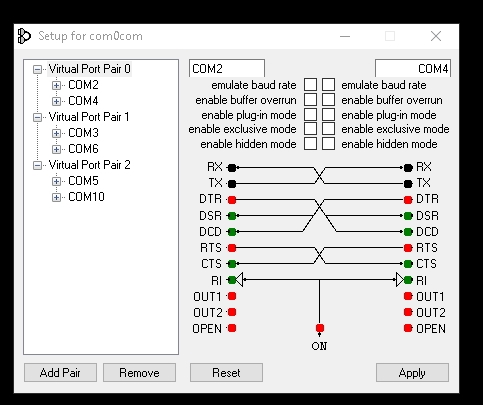
1)com0com машина 2 (трех групп достаточно)
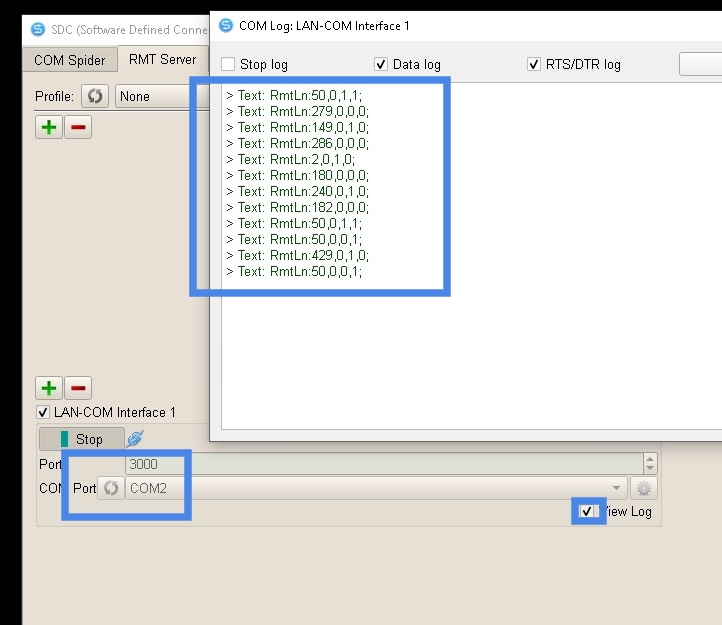
SDC машина 2 (сразу в логе видны нажатия), выбираем порт 2 (из пары 2-4)
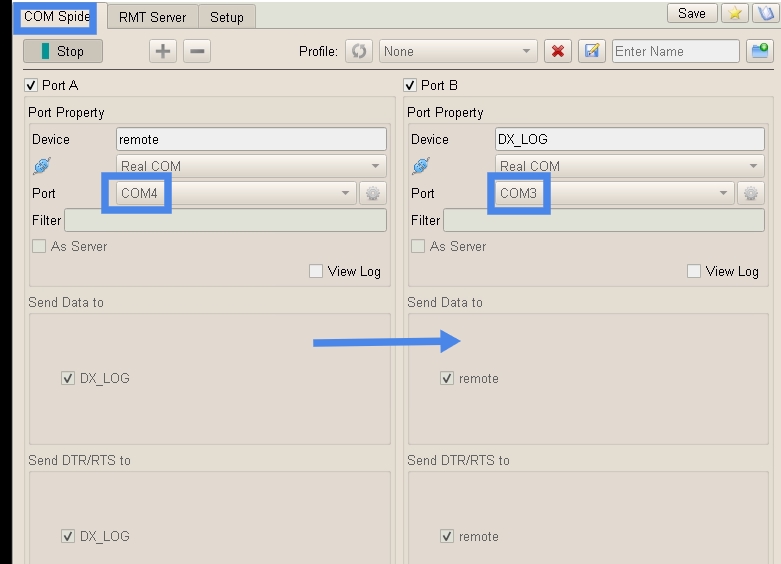
Второй экран (COM spider) машина 2, из порта 2 «данные» идут в порт 3 (пара 3-6)
DX LOG машина 2 , настройки
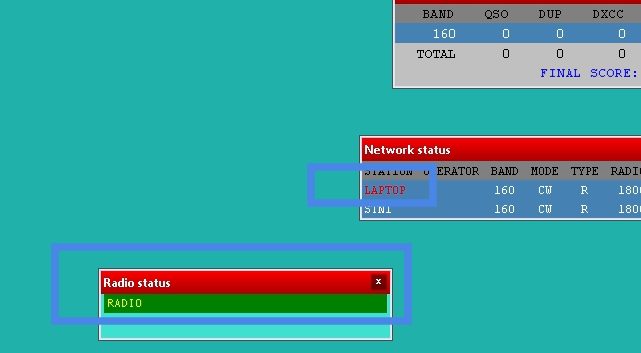
Результат — сигнал пришел на DXLOG, как точку, на которой мы можем его проконтролировать и протестировать. Далее его (или по аналогии другие сигналы) можно отправить туда куда нужно.
Так можно пробрасывать CAT и прочие необходимые сигналы.