
Вышла версия 2-10-3-13 бета, где TCI перешел наконец на новый уровень и больше не нужно гнать аудио поток в скиммер.

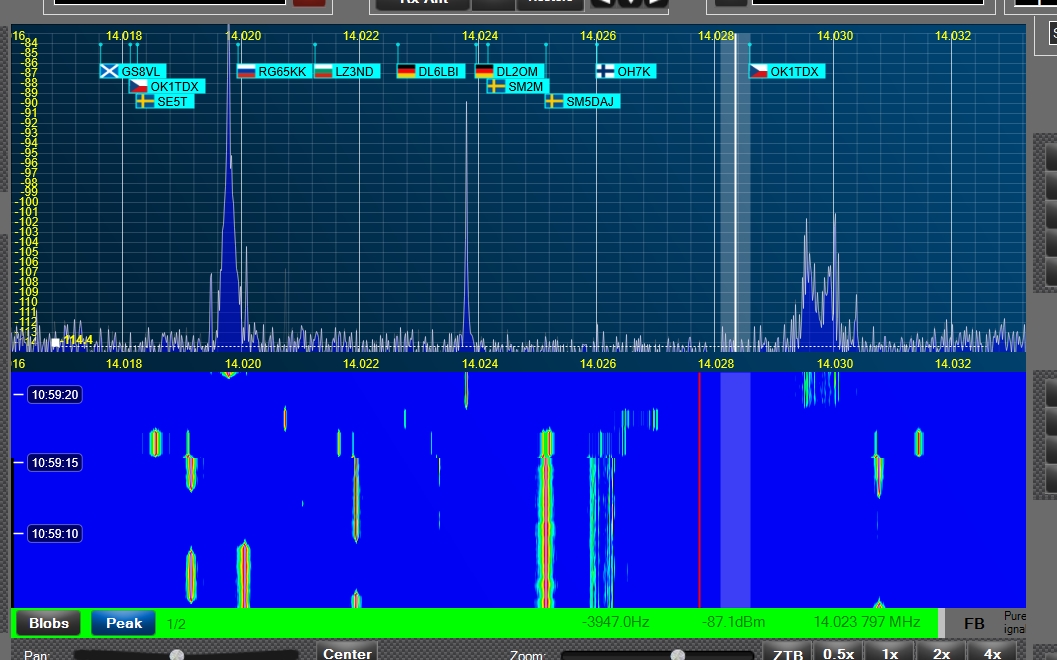
Теперь можно комфортно принимать эфир через первый VAC, и наслаждаться новыми прикольными спотами по TCI с SDC.
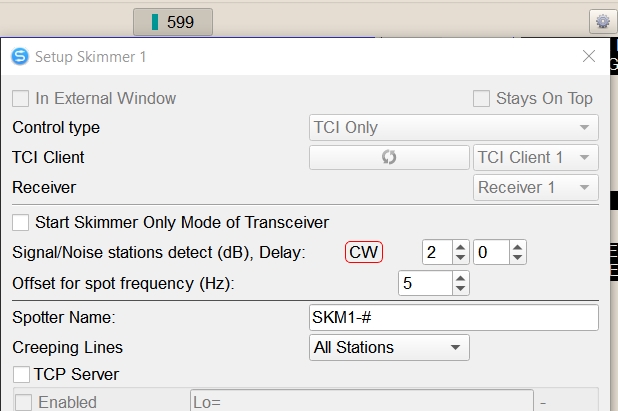
Настройки SDC можно вернуть назад на TCI ONLY
Да, запуск скиммера по «моде» все еще не работает, но это уже просто мелочи на фоне такого грандиозного прорыва.
Теперь не нужно перенастраивать SDC для совместимости с SUNSDR2.
А я, тем временем, решил реализовать свою старую хотелку для SunSDR2 , но для Гермеса, раз уж есть такая возможность.
Сделать валкодер 🙂
Взял ARDUINO NANO и просто энкодер KY-040 к Arduino, чтобы посмотреть, на что это вообще похоже.
Пару строк кода и вот оно уже работает. Код простейший,(не мой, взято с форума) :
#include <Encoder.h>
//v0.1// Теперь CLK на 2, DT на 3
Encoder tuningEnc(2, 3);
const int buttonPin = 4; // Кнопка SW на D4void setup() {
Serial.begin(115200);
pinMode(buttonPin, INPUT_PULLUP); // Подтягиваем кнопку к плюсу
tuningEnc.write(0);
}void loop() {
long tunePosition = tuningEnc.read();// Логика вращения (делим на 4 для устранения лишних шагов)
if (abs(tunePosition) >= 1) {
if (tunePosition > 0) {
Serial.print(«ZZSA;»); // Вправо
} else {
Serial.print(«ZZSB;»); // Влево
}
tuningEnc.write(0);
}// Проверка нажатия кнопки (SW)
if (digitalRead(buttonPin) == LOW) {
// Здесь можно отправить другую команду в Thetis, например:
// Serial.print(«ZZТX;»); // Пример команды
delay(200); // Антидребезг для кнопки
}
}
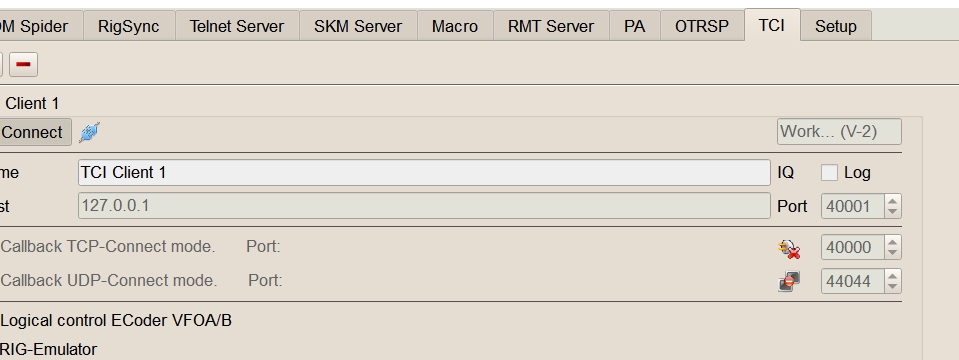
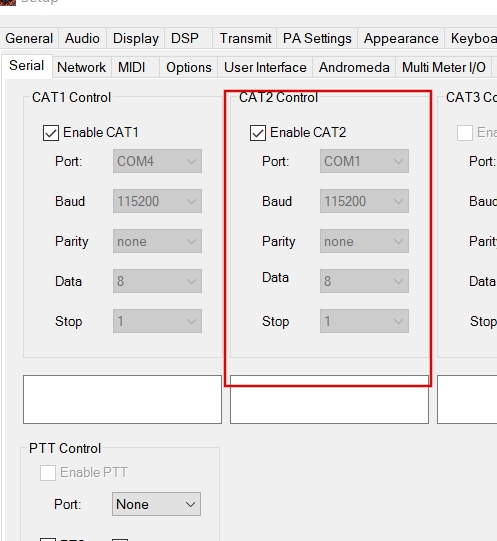
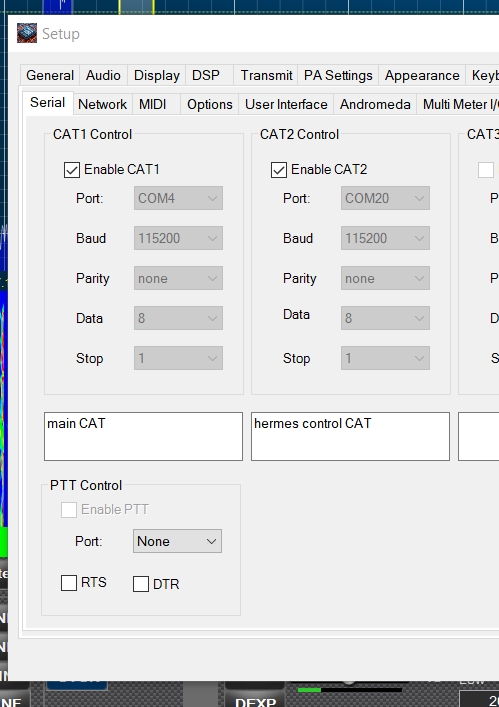
В настройках Thetis будем использовать кат, можно МИДИ но мне показалась так надежнее.
Но по ощущениям неудобно и вообще выглядит как полный колхоз. Решил как-то упорядочить…
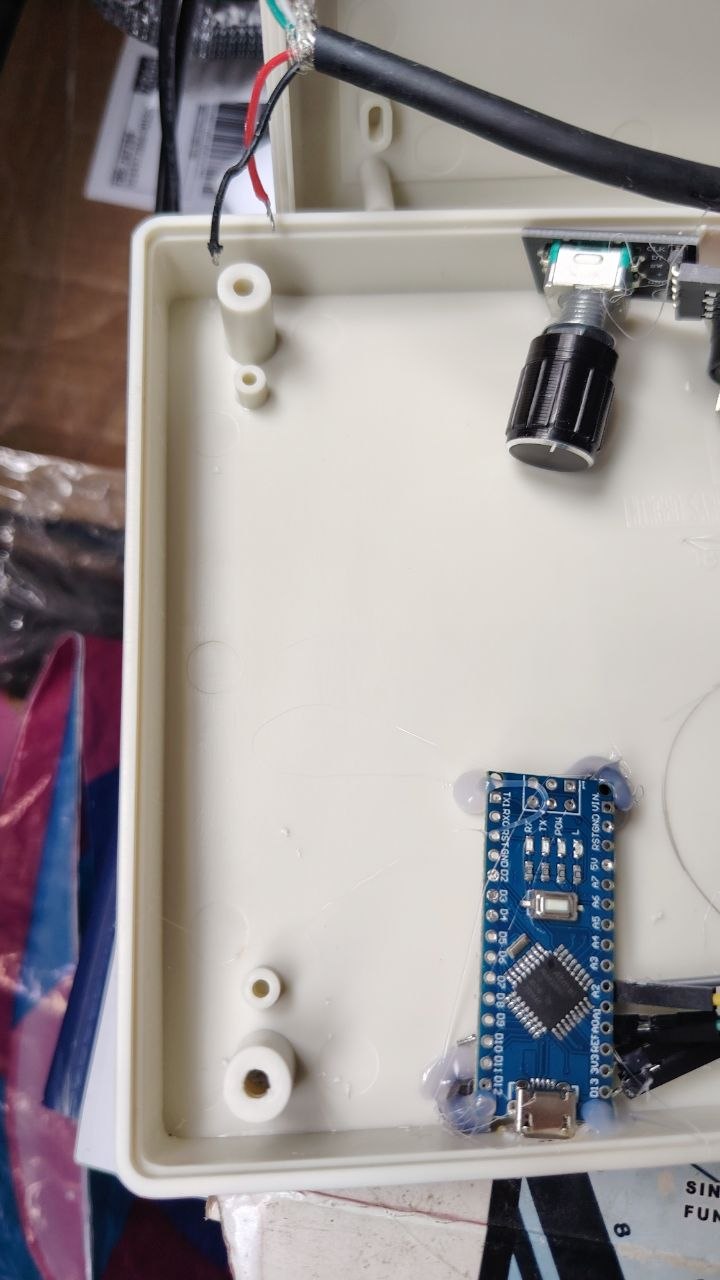
Получилось нечто такое:

Оптический валкодер VDC E38S6G5-600B-G24N и 4 нопки.
Код в ардуино вырос до версии 2.6 (т.е. где-то 26 итераций пережил) и разросся до 250 строк.
По ходу разработки пришлось столкнуться с рядом интересных проблем. Первая переход с ky-40 на оптический энкодер 600 имп./об. 5-24 VDC E38S6G5-600B-G24N.
По началу любые попытки вращать энкодер вызывали рывки и проблема не лечилась. Через некоторое время проблема проявилась — если в коде проскакивали незакомментированные сообщения, направляемые в порт-монитор для дебага, это сводило сума Thetis, так как по факту эти строки шли в CAT и там непонятным образом интерпретировались в числовые значения вызывавшие произвольные изменения частоты VFA. Лечилось правкой кода и принудительной перезагрузкой Thetis, даже если туда приходил валидный код он продалжал «глючить» и именно этот момент съел очень много времени и нервов.
Добавил 4 оперативные кнопки.
1. MOX — проблем не возникло, стандартные команды для CAT
2. Mute — тут все сложно, так как конкретно сам «mute» через CAT реализовать нельзя. По началу я сделал простой вариант — жмем кнопку и значения AF MASTER и AF RX1 уходят в 0. Еще одно нажатие и выставляем туда дефолтные значения 5 и 15. При практической эксплуатации это было неудобно так как сбивало настройки. Решил переделать, при запуске коробки читать через CAT текущие значения AF MASTER и AF RX1 и потом их восстанавливать. Так стало гораздо удобнее.
3. SPEED — масштабирование переключение скорости перемещения валкодера, быстро/медленно, ничего сложного в реализации.
4. RIT — по началу я сделал просто включение RIT кнопкой. И мне казалось после этого все должно работать само собой. Однако нет, частота живет своей жизнью, а расстройка управляется в маленьком окошечке внизу, возле кнопки включения. Ушло много времени на эксперименты и консультации с ИИ, прежде чем удалось подобрать CAT команду, которой расстройка сдвигалась вверх или внизу. Зато после этого все заработало так как задумано. Включаем RIT — по часовой стрелке вращение энкодера вызывает расстройку вверх по частоте, а простив часовой — вниз.
Коробка немного громоздка, хотелось бы меньше, но ни у меня ни на «озоне» ничего приемлемо меньшего не нашлось, пойдет и так…
Добавил кулер и радиатор, чтобы снять теплловую нагрузку.
